台州市贞灿纺染有限公司
首页
企业简介
产品大全
联系我们
企业信息
在线留言
当前位置:
首页
>
产品大全
>
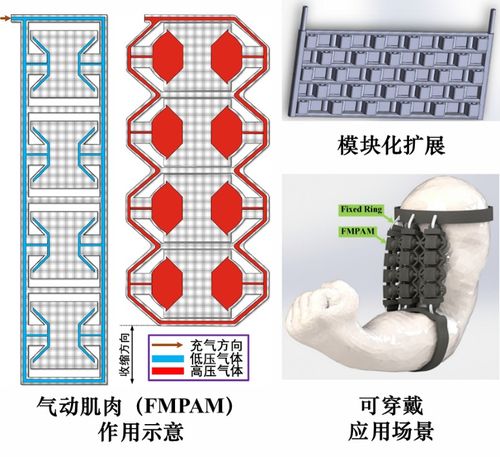
天津大学提出模块化柔性驱动新方法,可用于人工肌肉和管道机器人
天津大学提出模块化柔性驱动新方法,可用于人工肌肉和管道机器人
如若转载,请注明出处:http://www.tzencan.com/product/477.html
更新时间:2025-09-22 23:19:57
产品列表
PRODUCT
锗钛纤维 远红外保暖提温 健康能量纤维面料
美品民国印 棉纱羊毛蚕丝及人造丝染色学大纲 德国大德颜料厂
苍南县君福工艺厂 环保包装产品列表
红红烈火 商品证书纹图片
工艺布包 a 56图片,工艺布包 a 56高清图片 昆明市曼娜朵民族工艺制品厂,
脸上贴黄瓜真的无害吗
商机,天津无纺布袋,雄县占青无纺布制品厂2规格型号及价格 无纺布袋 塑料袋 纸箱纸盒 贵宾卡
塑胶件 塑胶产品 塑胶模具 东升模具塑胶五金制品厂
大型铸钢厂厂家如何铸造出优质的铸钢件产品
嘉定造科技密码 ,等你来探寻